#include "crypto_pke_struct.h"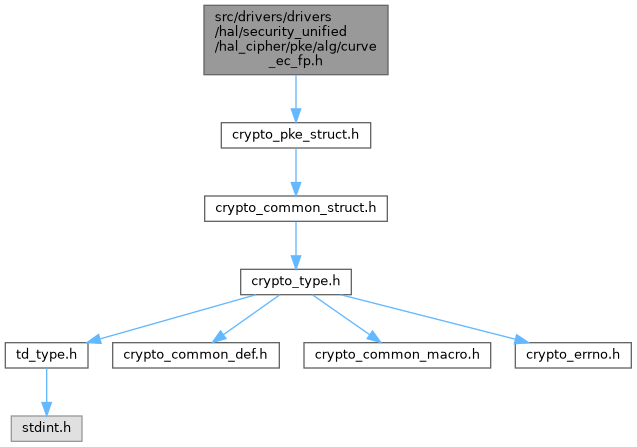
函数 | |
| td_s32 | decode_priv_key (td_u8 *output_key, const td_u8 *input_key, td_u32 klen) |
| decode the normal k value. In RFC7748, the k value and point on curve are all encoded. | |
| td_s32 | decode_point_x (td_u8 *output_u_x, const td_u8 *input_u_x, td_u32 ulen) |
| decode the x coordinate of the point. In RFC7748, the k value and point on curve are all encoded. | |
| td_s32 | encode_point_x (td_u8 *output_u_x, const td_u8 *input_u_x, td_u32 ulen) |
| encode the x coordinate of the point. In RFC7748, the k value and point on curve are all encoded. | |
| td_s32 | curve_ecfp_mul (const drv_pke_ecc_curve *ecc, const drv_pke_data *k, const drv_pke_data *ux, const drv_pke_data *rx) |
| Rx = k * ux. calculate point multiplication for curve25519 and curve448. before call this API you should have decoded the k value and the x coordinate of the point. after call this API, if you will transfer the rx to user, you should encode the rx by yourself. | |
| td_s32 | curve_ecfp_mul_dot (const drv_pke_ecc_curve *ecc, const drv_pke_data *k, const drv_pke_ecc_point *p, const drv_pke_ecc_point *r CIPHER_CHECK_WORD) |
| rx = k * px. calculate point multiplication for curve25519 and curve448. | |
函数说明
◆ curve_ecfp_mul()
| td_s32 curve_ecfp_mul | ( | const drv_pke_ecc_curve * | ecc, |
| const drv_pke_data * | k, | ||
| const drv_pke_data * | ux, | ||
| const drv_pke_data * | rx | ||
| ) |
Rx = k * ux. calculate point multiplication for curve25519 and curve448. before call this API you should have decoded the k value and the x coordinate of the point. after call this API, if you will transfer the rx to user, you should encode the rx by yourself.
- 参数
-
ecc the ecc curve param. k the input decoded normal k value. ux the intput decoded x coordinate of the point. rx the output without encoded x coordinate of the point.
- 返回
- td_s32 TD_SUCCESS or others.
◆ curve_ecfp_mul_dot()
| td_s32 curve_ecfp_mul_dot | ( | const drv_pke_ecc_curve * | ecc, |
| const drv_pke_data * | k, | ||
| const drv_pke_ecc_point * | p, | ||
| const drv_pke_ecc_point *r | CIPHER_CHECK_WORD | ||
| ) |
rx = k * px. calculate point multiplication for curve25519 and curve448.
- 参数
-
ecc The ecc curve param. k The input decoded normal k value. p The intput decoded x coordinate of the point. CIPHER_CHECK_WORD ifdef SEC_ENHANCE, the value is XOR result of parameters, otherwise it doesn't exist.
- 返回
- td_s32 TD_SUCCESS or others.
◆ decode_point_x()
decode the x coordinate of the point. In RFC7748, the k value and point on curve are all encoded.
- 参数
-
output_u_x the decoded x coordinate of the point, which can be used in calculation directly. input_u_x the input encoded x coordinate of the point. ulen the byte length of x coordinate of the point.
- 返回
- td_s32 TD_SUCCESS or others.
◆ decode_priv_key()
decode the normal k value. In RFC7748, the k value and point on curve are all encoded.
Copyright (c) HiSilicon (Shanghai) Technologies Co., Ltd. 2022-2022. All rights reserved. Description: the curve drv common algorithm head file. The data will transfor by the func param and will be set into DRAM in the algorithms.
Create: 2022-10-27
- 参数
-
output_key the decoded k value, which can be used in calculation directly. input_key the input encoded k value. klen the byte length of k value.
- 返回
- td_s32 TD_SUCCESS or others.
◆ encode_point_x()
encode the x coordinate of the point. In RFC7748, the k value and point on curve are all encoded.
- 参数
-
output_u_x the encoded x coordinate of the point, which will be transfered to user. input_u_x the input x coordinate of the point. ulen the byte length of x coordinate of the point.
- 返回
- td_s32 TD_SUCCESS or others.